The next generation of spacecraft must achieve higher levels of autonomy to handle a wide range of tasks, from deep-space exploration to in-orbit servicing and space debris management. The growing demands for autonomous navigation require cutting-edge sensors and advanced computational power to ensure precise and efficient mission execution.
Moreover, the diverse requirements of space missions call for highly adaptable onboard software. Some missions require real-time responsiveness with minimal latency, while others prioritize ultra-low power consumption. As a result, onboard software must seamlessly balance these demands, ensuring both rapid event processing and efficient energy management.
Additionally, compliance with ECSS standards guarantees that space systems meet essential reliability, safety, and performance requirements. This adherence is fundamental to enhancing the robustness of AI algorithms, ensuring they are well-suited to the unique challenges and constraints of the space environment.
This work builds upon Klepsydra’s previous efforts, supported by ESA, in advancing AI for flight software. The KATESU initiative assessed OBPMark-ML Deep Neural Network (DNN) models on two onboard computers—Teledyne e2v’s LS1046 and the ZedBoard (Xilinx ZYNQ 7000)—both running embedded Linux. This earlier research showcased significant performance gains, including substantial improvements in data processing speed and power efficiency over conventional AI solutions, laying the foundation for truly autonomous AI in space.
Making AI applications viable for institutional missions requires a fully ECSS-compliant hardware and software stack. This research takes a key step toward that goal by porting an advanced inference engine to two space-qualified onboard processors, the GR740 and GR765, as well as the HPDP co-processor. Additionally, the selected operating system, RTEMS6 SMP, is an ECSS-certified real-time OS, ensuring compliance with stringent spaceflight requirements.
Currently, Klepsydra’s software utilizes the POSIX standard for multi-threading, which is commonly supported in Linux-based operating systems. However, the PATTERN project will be built on the RTEMS6 SMP operating system. While RTEMS6 SMP does include POSIX support, this component is not yet space-qualified and remains under discussion within ESA. As a result, extending support beyond POSIX to additional multi-threading APIs will be necessary to ensure full compatibility with space mission requirements.
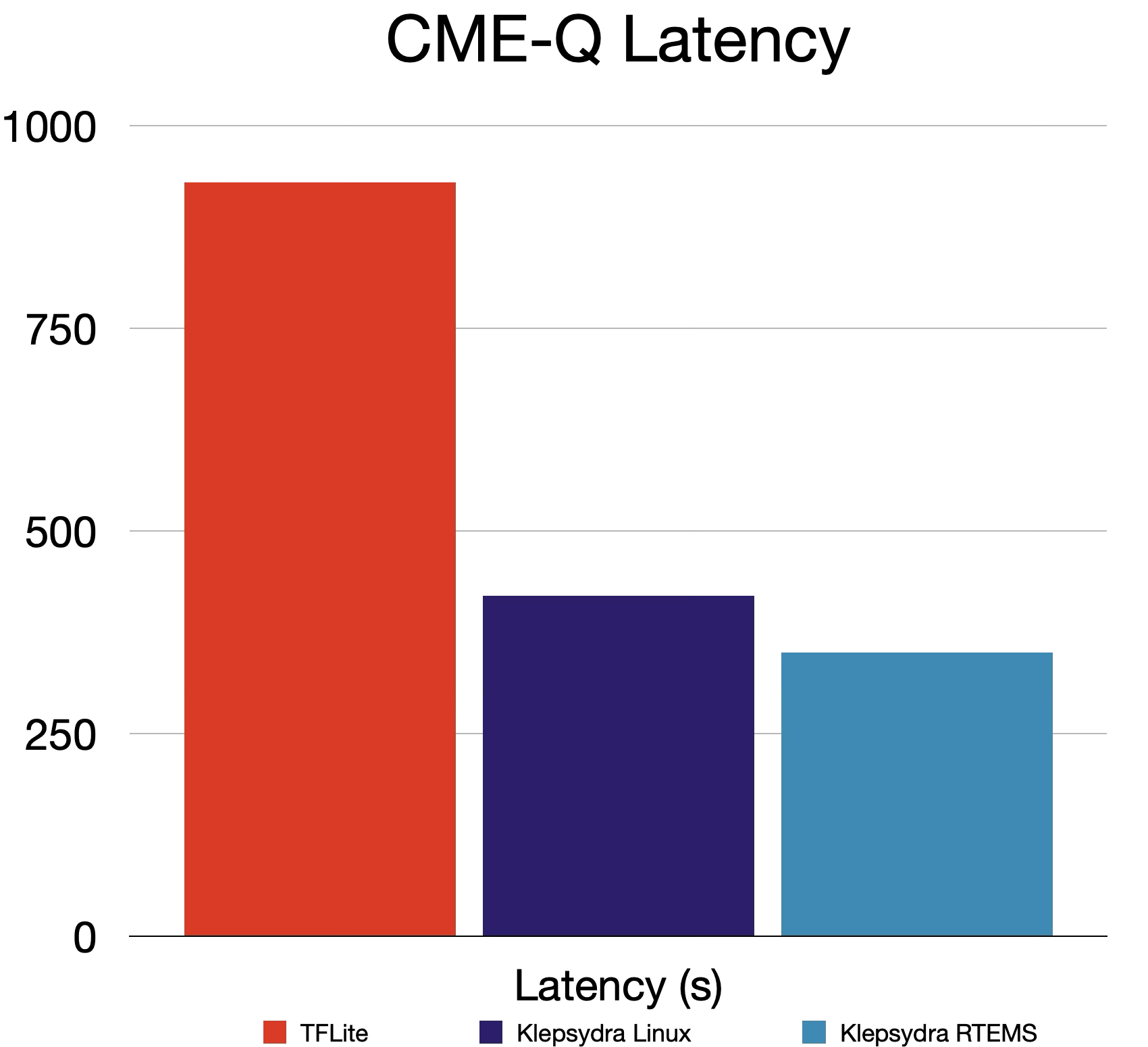
The benchmarks achieved for the ZedBoard on RTEMS6 SMP are highly impressive, as illustrated in the figures below. These results were obtained using models from ESA’s OBPMark-ML benchmarking framework, demonstrating the efficiency of running AI with Klepsydra on ARM architectures using RTEMS6 SMP. This represents a fully space-qualified hardware and software setup, offering a reliable and high-performance solution for future missions.